Rotational
kinetic energy
Let us picture a rigid body
turning with angular velocity ω, like the Earth in this picture. Mentally,
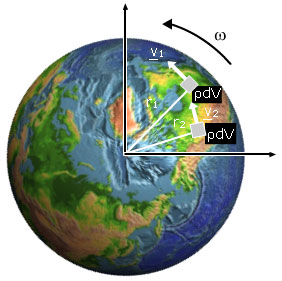 let's divide it up into a collection of small masses. With respect to the axis of rotation, a single mass m at radius r is travelling at speed of
let's divide it up into a collection of small masses. With respect to the axis of rotation, a single mass m at radius r is travelling at speed of
v = rω
(You may revise circular motion at this point.) Its kinetic energy is ½ mv2. So let's imagine the dividing the object up into many masses mi at distances rifrom the axis. Each has vi = riω, where ω has the same value for all the masses because the object is (by assumption) rigid. So the total rotational kinetic energy is
Rotational kinematics
The graphs above show displacement, velocity and acceleration for linear motion with constant acceleration (at left) and for circular motion with constant angular acceleration. Just for practice, let's derive the new equations (and revise the kinematics section if this looks difficult!) If we consider motion with constant acceleration, and remember that α = dω/dt, we have
Forces cause accelerations. To make something turn, we apply a torque. We shall define if first, and then explain why this definition is logical. Later we shall see the complete analogy with Newton's laws for linear motion.
We shall discuss the magnitude first, then the direction.

let's divide it up into a collection of small masses. With respect to the axis of rotation, a single mass m at radius r is travelling at speed of v = rω
(You may revise circular motion at this point.) Its kinetic energy is ½ mv2. So let's imagine the dividing the object up into many masses mi at distances rifrom the axis. Each has vi = riω, where ω has the same value for all the masses because the object is (by assumption) rigid. So the total rotational kinetic energy is
{kind=link}
Krot= Σ Ki= Σ ½ miri2ω2
where the summation is over all of the i. ½ ω2 is a common factor in every term of the sum, so
Krot= ½(Σ miri2)ω2 = ½ Iω2 where
I = Σ miri2is the moment of inertia.
This is the result for a
collection of discrete masses, mi. For a continuous body, we should
normally divide it up into small elements of volume, dV. (You can
revise calculus.) From
the definition of density ρ, each has mass
dm = ρdV.
Instead of an ordinary summation, we do an integral
(the equivalent of summation for very small divisions), and we have
Krot
= ½(∫ dm.r2)ω2 = ½ Iω2 where
I = ∫ r2.dm
is the moment of inertia for a continous body
and where the integration is over
the whole volume occupied by the rigid body in question.
Rotational kinematics
As
mentioned in the multimedia tutorial, there are very strong analogies between
linear and rotational kinematics. If s is the distance of the arc travelled
along a circle of radius r, then angular displacement θ is just
s/r. Angular velocity ω = dθ/dt = (ds/dt)/r
= v/r. Angular acceleration α = dω/dt = (dv/dt)/r = a/r.
So, as shown in the diagram below, the analogies of the linear quantities s, v and a are θ, ω and α, which we obtain by dividing the linear quantities by r. |
ω = ∫ α dt = αt + ω0
And from ω = dθ/dt, we
can integrate again to get:
θ = ∫ ω dt = ½αt2
+ ωt + θ0
From the
two equations above, we can eliminate t to get
ω2 − ω02 = 2α(θ − θ0).
So we
have equations completely analogous to those of linear kinematics:
ω = ω0 + αt and θ = θ0 + ω0t + ½αt2
and ω2 − ω02 = 2α(θ − θ0)
v = v0 + at and s = s0 + v0t + ½at2 and v2 − v02 = 2a(s − s0).
v = v0 + at and s = s0 + v0t + ½at2 and v2 − v02 = 2a(s − s0).
Forces cause accelerations. To make something turn, we apply a torque. We shall define if first, and then explain why this definition is logical. Later we shall see the complete analogy with Newton's laws for linear motion.
The torque τ is defined by
τ = rX F
where force F acts at a point displaced by r from the axis. The magnitude of the torque is given by
τ = r F sin θ
where θ is the angle between r and F.

 The photos at right show three ways of using a spanner. In the first pair, we compare a small value of r (small torque) with a large r and large τ. In the second, we compare θ = zero and θ = 90°. In the former case, the torque is zero. From experience, you know that you need large r, θ = 90° and large F to obtain the maximum torque. |
|
Disponible en: http://www.animations.physics.unsw.edu.au/jw/rotation.htm
No hay comentarios:
Publicar un comentario
Respuestas: